競技会レポート
実験のテーマと目的
「センサ、情報、アクチュエーター」系と外界とのインタラクションを伴う知能移動体の設計製作を体験する。それによって、各授業科目の重要性、意義を体験する。自分で考える事、設計製作する事、グループで作業する事の楽しさを体験する。
競技内容
自走型ロボットに固定オブジェクト、または決められた色ライン上の壁を探索させ、タッチしてメロディを鳴らせば得点になる。得点を競い合う対戦型ゲーム。
ロボットの説明および特徴
四輪駆動型マシンで、LEGO MindoStormsの付属説明書に通りに基本的に作成。タッチセンサの接触部分を大きくするために、ブロックを用いて反応する面積を大きくしている。マシンのスピードを上げるために、ギア比を変えている。どうしても時間制御なので、壁にぶつかってしまう事は避けられないので、マシンの側面に丸型の車輪で壁をそうようにする。
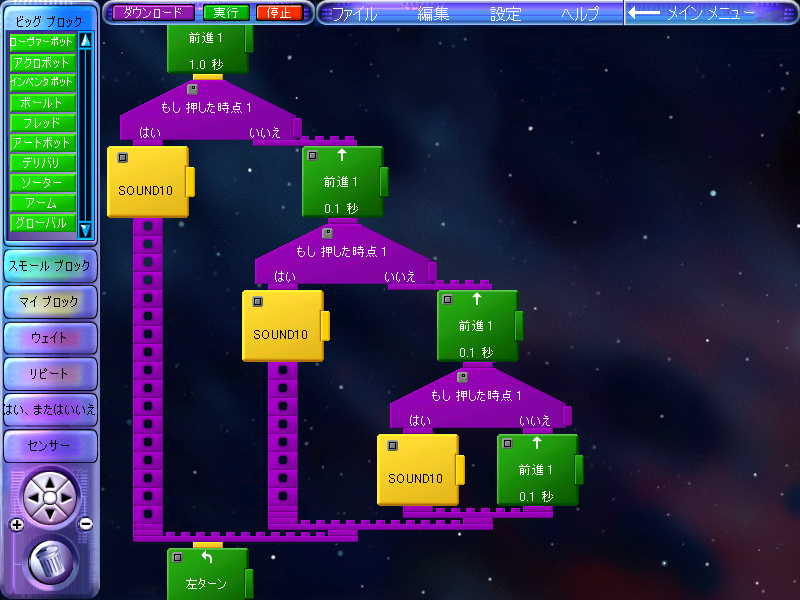
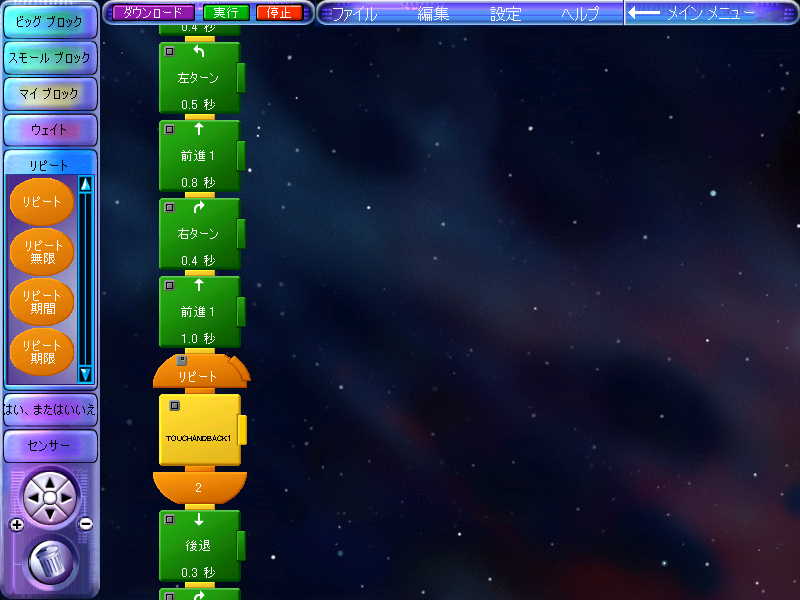
プログラムおよび説明
白チームの ソース 黒チームの ソース
白、黒どちらのチームでも自陣側の3つの固定オブジェクトにタッチ。そして、チーム色の奥の壁を2つタッチ。青色の奥の壁を2つタッチ。ここで、プログラムのメモリオーバーなので、終了。
フローチャート
白チームバージョン(黒チームは白チームの左右反転させるのみなので省略)








主に担当したこと
特にこれをするということを共同実験者同士で決めたわけでもなく、相手がプログラムをしている時は、私はマシンという風にした。
競技結果
|
3 |
5 |
14 |
| 11 |
○ |
× |
× |
| 得点結果 |
10-0 |
10-75 |
0-6 |
1勝2敗で4位でした。
5班との対戦の再試合をやらなくて、14班との試合で私のチームに減点が無ければ1位だったのにと悔やまれるところです。
3回とも3つ目のオブジェクトに当たって誤作動してしまいました。
考察
すべての結果に繋がってしまったことは、プログラムを時間制御にしてしまったことである。CDROMの説明を真面目に聞いておらず、便利なマイブロックを使いそびれてしまったのが原因である。電池を交換した(交換せざるをえなかった)ので、うまく動作していたのが駄目になってしまった。パームウェアの交換、充電の時間など実験その物より他の所で時間をくってしまったのも要因である。また、モーターのパワーを左右最大にしていても真っ直ぐにマシンが走らず、いつも左にそれてしまった事を克服できなかったのが悔やまれる。唯、左右のモータのパワーを変えてどちらかだけ強くするとかしてもうまく真っ直ぐに進む事ができなかったのでどうしようもない。
実験における感想
実際のプログラムではないが、ブロックでプログラムらしきものを作っていきマシンが動いたことで感動した。結果は伴わなかったが、講義でやってきたことが実験という形になって現れたと言う点でこれからの講義、演習を身をもって大切にしなければならないと感じた。2コマの授業が短く感じられるほどに楽しかったし、有意義だったと思う。
最後に
実験を一緒にした日野君、またお世話になりました教官ならびにTAの方々、ありがとうございました。
サブゴール1へ
サブゴール2へ
topページへ